

1.データ駆動制御の概要
(1)従前の制御系設計の考え方
イ. 制御対象モデル
ロ. 古典制御
ハ. 現代制御
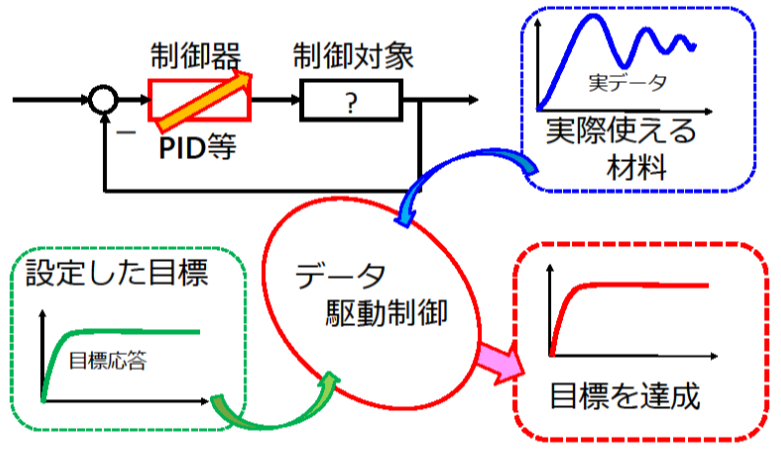
(2)データを直接用いるアプローチ
イ. データ駆動制御
ロ. メリット
2. データを活用した制御系設計
(1)従前のデータを活用した制御系設計
イ. 限界感度法
ロ. ジーグラ・ニコルス法
(2)データ駆動制御による制御系設計
イ. 最小二乗法と最適化
ロ. FRIT(Fictitious Reference Iterative Tuning)
ハ. VIMT(Virtual Internal Model Tuning)
3.データ駆動制御の設計法
(1)FRITのアルゴリズム
(2)制御仕様
(3)疑似参照信号
(4)評価関数
(5)最適化計算(ガウスニュートン法)
(6)シミュレーション実習
4.応用実習(DCモーター速度制御器の設計・評価)
(1)実習システムの概要
(2)実験データの取得
(3)調整仕様の決定
(4)評価関数設定と最適化計算
イ. FRITによるPID制御器設計
ロ. FRITによるI-PD制御器設計
ハ. VIMTによるPID制御器設計
ニ. VIMTによるI-PD制御器設計
(5)制御実験と評価
5.まとめ
(1)実習の全体的な講評及び確認・評価
≪担当予定講師≫
電気通信大学 教授 金子 修(『データ駆動制御入門』など、著書多数)、岡山大学 池崎 太一
コース番号 J0191 データ駆動制御の理論と実際
訓練日程
12/18(木)~12/19(金)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
12時間
受講料
25,000円
定員
12名
対象者
~モデリングを行わず、データを直接用いて制御器を設計する方法です~
制御関連の業務に携わる方
≪訓練内容の概要≫
収集データを直接用いて、制御システムの設計・調整を行うデータ駆動制御が注目されています。本コースでは、データ駆動制御のしくみを理解するとともに、実践に活かすことができる設計・調整スキルを実習を通して習得します。キーワード:PID、チューニング、産業応用、位置決め、データ駆動予測
制御関連の業務に携わる方
≪訓練内容の概要≫
収集データを直接用いて、制御システムの設計・調整を行うデータ駆動制御が注目されています。本コースでは、データ駆動制御のしくみを理解するとともに、実践に活かすことができる設計・調整スキルを実習を通して習得します。キーワード:PID、チューニング、産業応用、位置決め、データ駆動予測
訓練内容
使用機器・教材
制御実習装置、MATLAB/Simulink
持参品・服装
実施場所
高度ポリテクセンター
備考
受講者の声
- 研修を受講し、自社の製品開発に活かせると感じた。
- 講義内容、実習の題材ともに最適だと思いました。
- 理論と実技を通じて理解を深めることができ、役に立った。
- 社内装置の制御パラメータの調整に、今回学んだ手法を今後に活用できる。
- ゲイン調整作業時間の短縮に役立つ可能性がある。
お申込みはこちら