

1.小型ロボットアームの概要
(1)小型ロボットアームの構成
(2)ペンダントによるリモート操作
(3)ロボットアームの可動方向、可動範囲
2.ティーチングによるロボットアーム制御
(1)ダイレクトティーチングによるロボットアーム制御
(2)ロボットアーム制御方式
(3)グリップアームによる部品ピッキング制御実習
(4)ペンによる線画制御実習
3.プログラムによるロボットア-ム制御
(1)ビジュアル言語とスクリプト言語
(2)順次処理・ピッキング
(3)繰り返し制御
(4)条件分岐制御
(5)変数を使ったロボットアーム制御・部品整列実習
4.画像認識によるロボットアーム制御
(1)画像認識の概要
(2)画像認識システムの構成
(3)画像認識プログラミング
(4)色判別によるロボットアーム制御実習
5.AIによる部品・商品仕分けの自動化実習
(1)AI(機械学習、深層学習、教師あり学習)の概要
(2)部品・商品仕分けシステムの構成
(3)画像認識による部品・商品仕分け
(4)部品・商品仕分け制御プログラミング
(5)AIによる部品・商品仕分けの自動化実習
6.まとめ
≪担当予定講師≫
株式会社アフレル
コース番号 J0181 画像認識・AIによる小型ロボットアームの制御と活用技術
訓練日程
11/18(火)~11/19(水)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
12時間
受講料
20,000円
定員
12名
対象者
~ロボットアーム×画像認識の活用技術が習得できます~
制御関連の業務に携わる方、製造設備の自動化に携わる方
≪訓練内容の概要≫
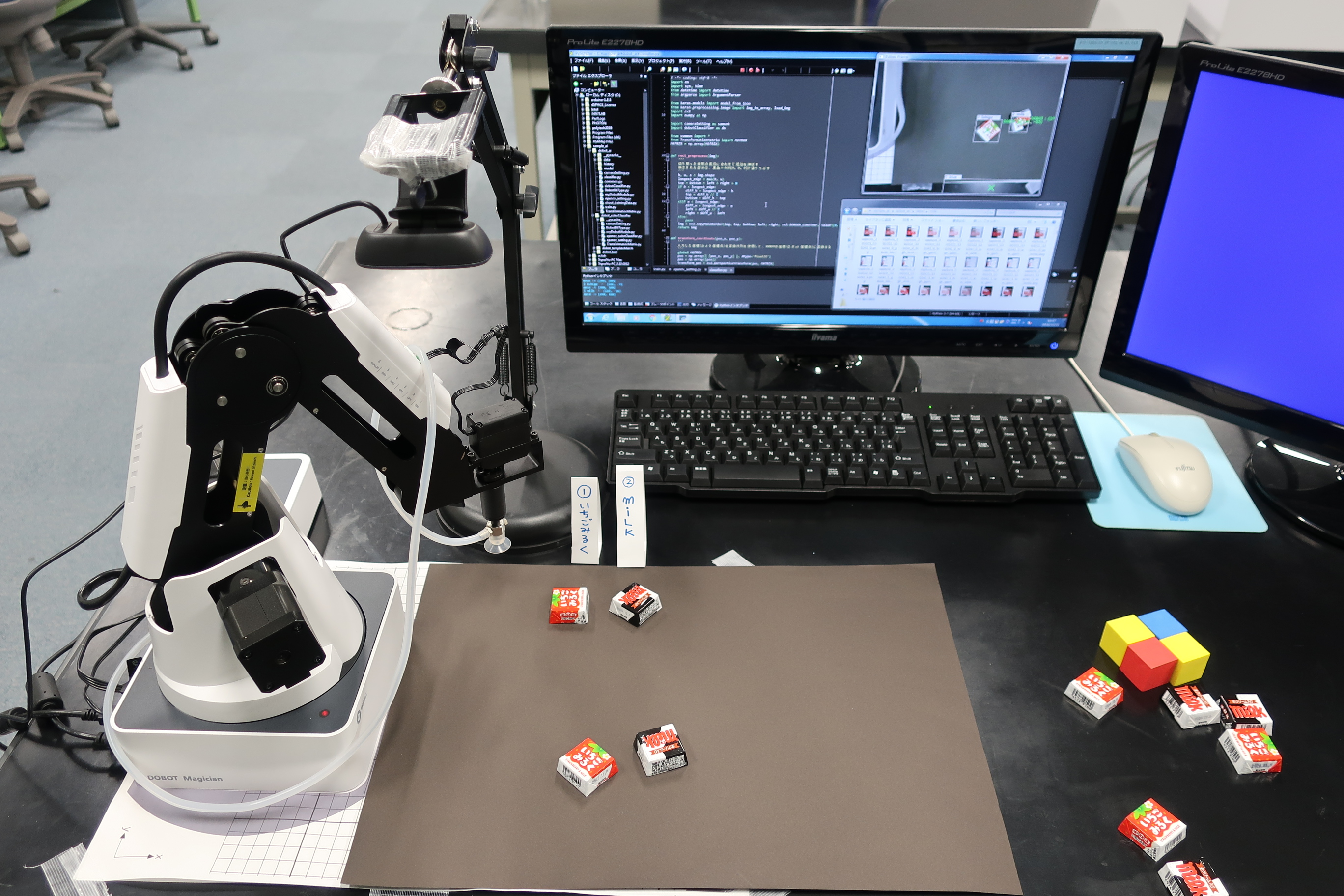
近年、小型で高精度な卓上型ロボットアームの活用が広まってきています。これまで人手で行っていた作業も、画像センサによる画像認識とロボットアーム制御を組み合わせることにより、様々な作業を代替でき、省力化につながるなど期待が持たれています。本セミナーでは、部品のピッキングからロボットアームのプログラミング、画像認識やAIを用いたロボット制御実習を通して、ロボットアームの活用技術を習得します。
制御関連の業務に携わる方、製造設備の自動化に携わる方
≪訓練内容の概要≫
近年、小型で高精度な卓上型ロボットアームの活用が広まってきています。これまで人手で行っていた作業も、画像センサによる画像認識とロボットアーム制御を組み合わせることにより、様々な作業を代替でき、省力化につながるなど期待が持たれています。本セミナーでは、部品のピッキングからロボットアームのプログラミング、画像認識やAIを用いたロボット制御実習を通して、ロボットアームの活用技術を習得します。
訓練内容
使用機器・教材
小型ロボットアーム、グリップアーム、画像センサ、Pytho、Tensor Flow
持参品・服装
実施場所
高度ポリテクセンター
備考
受講者の声
- 画像認識やAIについて、理解を深めることができた。
- 実習が多いので理解しやすかった。
- ロボットアームやAIの簡潔な構築環境について、知識を得ることができた。
- カメラを使ったピッキング作業を検討しているので、大変為になる講習でした。
- 社内で不足していたスキルのため役立った。
セミナーサンプル動画
お申込みはこちら