

1.コース概要及び留意事項
(1)コースの目的
(2)受講者が有する専門的能力の確認
(3)安全上の留意事項
2.システム制御について
(1)システムの表現(状態変数変換)
(2)可制御性と可観測性
(3)状態フィードバック制御と最適レジュレータ
(4)出力フィードバック制御と最適制御
3.ロバスト制御について
(1)モデルの不確かさとは
(2)ノミナルプラントと摂動プラント
(3)周波数生計
(4)ロバスト安定、ロバスト性能
4.ロバスト制御に必要な基礎事項
(1)行列公式
(2)特異値とノルム
(3)線形システムの記法
(4)リアプノフ方程式とリカッチ方程式
(5)H2ノルムとH∞ノルム
5.ロバスト制御理論
(1)モデルの不確かさ表現
イ.乗法的表現 ロ.加法的表現
(2)線形分数変換(LFT)と一般化制御対象
(3)小ゲイン定理とロバスト安定
6.H∞制御
(1)H∞制御問題
(2)感度低減問題、ロバスト安定化問題、混合感度低減問題
(3)非標準H∞制御問題の対策
7.H∞制御系設計実習
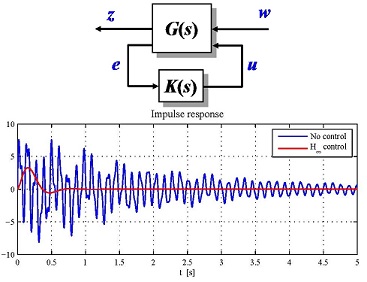
(1)H∞制御を用いた梁の横振動制御系設計実習
イ.制御対象のノミナルモデルの構成
ロ.基準モデルと厳密モデルの応答評価
ハ.モデルの不確かさの見積り
二.H∞コントローラ設計
ホ.LQGコントローラとの制御性能比較
8.まとめ
(1)実習の全体的な講評及び確認・評価
≪担当予定講師≫
山梨大学大学院 教授 藤森 篤(『ロバスト制御』など、著書多数)
コース番号 J0081 ロバスト制御技術〈現代制御応用コース〉
訓練日程
11/17(月)~11/19(水)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
18時間
受講料
26,000円
定員
12名
対象者
~H∞制御の設計・解析手法がわかりやすく理解できます~
制御系の開発・設計に携わる方で、現代制御の基礎知識がある方
≪訓練内容の概要≫
H∞制御理論を中心としたロバスト制御技術による制御系の解析・設計法が習得できます。また、制御器設計の各段階におけるMATLABのプログラミング実習を通して、ロバスト制御系の設計手法が習得できます。キーワード:現代制御、ロバスト制御、H∞制御
制御系の開発・設計に携わる方で、現代制御の基礎知識がある方
≪訓練内容の概要≫
H∞制御理論を中心としたロバスト制御技術による制御系の解析・設計法が習得できます。また、制御器設計の各段階におけるMATLABのプログラミング実習を通して、ロバスト制御系の設計手法が習得できます。キーワード:現代制御、ロバスト制御、H∞制御
訓練内容
使用機器・教材
ソフトウェア:MATLAB、Simulink
持参品・服装
実施場所
高度ポリテクセンター
備考
受講者の声
- システム制御とその先の制御について視野が広がった。
セミナーサンプル動画
お申込みはこちら