

1.制御技術の概要
(1)自動制御とは
イ.シーケンス制御とフィードバック制御
(2)制御技術とは
イ.古典制御について
ロ.現代制御
2.モデル化のアプローチについて
(1)物理原理からの数式の導出
(2)構造モデルの理解と計測データからの式の同定
(3)伝達関数について
3.シミュレーション(古典制御)
(1)制御対象のステップ応答と周波数応答の解析
(2)P制御のステップ応答と周波数応答の解析
(3)I制御のステップ応答と周波数応答の解析
イ.2次遅れ系の特徴の理解
ロ.固有周波数と減衰定数の理解
ハ.ゲイン余裕と位相余裕による設計ポイント
(4)PIコントローラ設計
(5)PDコントローラ設計
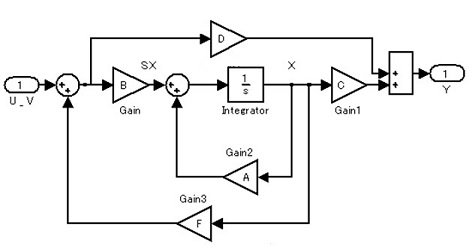
4.シミュレーション(現代制御)
(1)状態変数、状態方程式について
(2)制御対象の初期値応答の解析
(3)現代制御での安定性解析について
(4)極配置法と状態フィードバック
(5)オブザーバについて
5.まとめ
(1)実習の全体的な講評及び確認・評価
≪担当予定講師≫
システムシミュレーション研究所 城谷 聡美(『図解と実験で学ぶサーボ制御の理論と実践』など、著書多数)
コース番号 J0061 シミュレーションで学ぶ古典制御と現代制御
訓練日程
8/25(月)~8/26(火)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
12時間
受講料
20,000円
定員
14名
対象者
~古典制御から現代制御へ、もう一歩ステップアップしたい方へ~
サーボ系の制御系設計に携わる方
≪訓練内容の概要≫
MATLAB/Simulinkを使用して制御系設計をシミュレーションをベースに習得します。同一の制御対象(モータ系)を古典制御(PID制御)による設計と現代制御で設計を行うことにより両方の制御系設計法を習得できます。
サーボ系の制御系設計に携わる方
≪訓練内容の概要≫
MATLAB/Simulinkを使用して制御系設計をシミュレーションをベースに習得します。同一の制御対象(モータ系)を古典制御(PID制御)による設計と現代制御で設計を行うことにより両方の制御系設計法を習得できます。
訓練内容
使用機器・教材
ソフトウェア:MATLAB、Simulink
持参品・服装
実施場所
高度ポリテクセンター
備考
受講者の声
- MATLABや現代制御に触れることが初めてだったので勉強になりました。
- 古典制御におけるPID制御系の理論的理解ができた。
- また、現代制御における状態空間方程式の作り方を学べた。
- 実践的な講義で、制御系の設計をどのようにするのか理解できた。
- 古典と現代を別々に学んできて、同時に比較することが少なかったので、具体的に2つを比較しながらできたことは理解につながった。
- 現代制御を業務に落としこめるイメージがもてた。
お申込みはこちら