

1.サーボ制御要求特性
(1)基本設計 (安定性確保、定常偏差ゼロ、応答性向上、振動抑制など)
(2)負荷を含めたサーボシステムの要求
イ.負荷変動や外乱に対する抑制
ロ.サーボ不安定アルゴリズムの除去
ハ.モデル化誤差や外乱誤差に対するロバスト性
2.モデル化
(1)物理モデル
(2)伝達関数とブロック線図
(3)システムのモデル化
3.トルク制御(電流制御)
(1)比例制御による外乱抑制
(2)PI制御による外乱抑制
(3)加速度制御(MATLAB/Simulinkでのシミュレーションと負荷装置での実験)
4.実用性の高い制御方式
(1)外乱オブザーバによるフィードフォワード制御
(2)モデル追従制御
5.制振制御
(1)共振と反共振について
(2)低剛性負荷における制振制御
6.確認・評価
(1)実習の全体的な講評および確認・評価
≪担当予定講師≫
システムシミュレーション研究所 城谷 聡美(『図解と実験で学ぶサーボ制御の理論と実践』など、著書多数)
コース番号 J0041 ロバスト制御によるサーボ制御技術
訓練日程
12/3(水)~12/5(金)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
18時間
受講料
26,000円
定員
12名
対象者
~PID制御だけでは解決できない、より高精度な制御手法を習得できます~
サーボ系の制御系設計に携わる方
≪訓練内容の概要≫
負荷変動や外乱に対してのロバストなサーボ制御の実現法、およびモータ軸に連結されている負荷側からの外乱、共振・反共振に対する外乱抑圧、制振制御に関する技術課題について理論と実用化の両面から考察します。実際に実習装置で動作検証を行いながらロバストな制御系設計について習得できます。キーワード:トルク制御、外乱抑圧、制振制御
サーボ系の制御系設計に携わる方
≪訓練内容の概要≫
負荷変動や外乱に対してのロバストなサーボ制御の実現法、およびモータ軸に連結されている負荷側からの外乱、共振・反共振に対する外乱抑圧、制振制御に関する技術課題について理論と実用化の両面から考察します。実際に実習装置で動作検証を行いながらロバストな制御系設計について習得できます。キーワード:トルク制御、外乱抑圧、制振制御
訓練内容
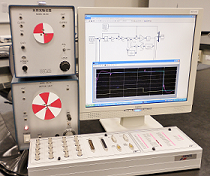
使用機器・教材
ハードウェア:DCモータ、サーボ制御実習装置、負荷実験装置
ソフトウェア:MATLAB
ソフトウェア:MATLAB
持参品・服装
実施場所
高度ポリテクセンター
備考
関連コース
- 受講者の声設計業務に直結する内容を教えて頂いた。また、実機による実験もできたため、理論と実際におけるギャップを確認できた。
- 今までPID制御しか分かっておらず、制御上の課題に行き詰っていたが、新たな知識を得られたことで解決の糸口が見えた。
- 負荷変動による速度変動の改善や振動低減に活用できる。書籍だけでは伝わらない、コツの様なものを得られた。
- オブザーバの使い方について学ぶことができた。
お申込みはこちら