

1.ロボット開発環境構築
(1)開発システム構成
(2)開発環境構築
イ.Linux開発環境構築
ロ.PCとRaspberryPi間でのssh通信
ハ.ROS環境構築
2.ROS通信
(1)ROS通信ライブラリ
(2)ROSノード間の通信
(3)複数ノード同時起動
3.プログラミング技法
(1)ハードウェア構成
(2)入出力制御
(3)アナログセンサ値の取得
(4)モータ制御
(5)自律ロボットシステム
4.総合課題
(1)応用課題演習
5.まとめ
(1)実習の全体的な講評及び確認・評価
≪担当予定講師≫
千葉工業大学 未来ロボティクス学科 教授 博士(工学) 上田 隆一
コース番号 E0701 ROSを活用したロボット制御技術
訓練日程
7/31(木)~8/1(金)
実施時間帯
10:00~16:45
(昼休憩45分)
総訓練時間
12時間
受講料
26,000円
定員
12名
対象者
~実機を用いたロボットプログラミング技法と環境構築について習得します~
これからロボット開発を行う者、もしくは検討している方
≪訓練内容の概要≫
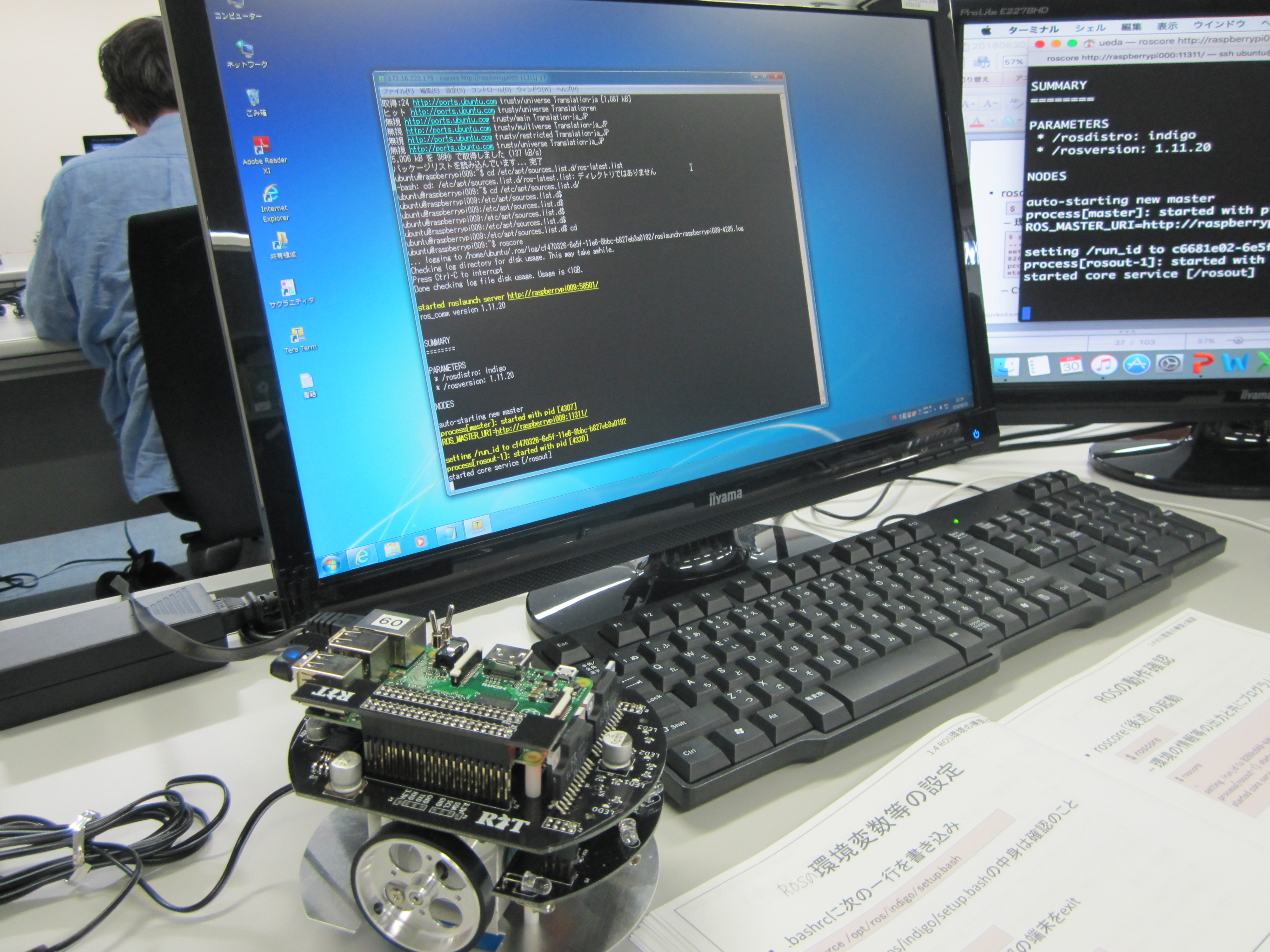
オープンロボットミドルウェアであるROS(Robot Operating System)を使用しての、ロボット制御のプログラミング技法を習得します。コンピュータボードRaspberry Pi上でのROSのセットアップ方法と仕組みの理解、センサやモータを動かすためのプログラミング技術を通して、ロボットのソフトウェア構築を効率よく行う能力を身につけます。また、ROS操作に必要なLinux OSのコマンドライン操作についても実習で行います。
≪前提知識≫
Linuxの基本的なコマンド操作及びプログラミング経験のある方
これからロボット開発を行う者、もしくは検討している方
≪訓練内容の概要≫
オープンロボットミドルウェアであるROS(Robot Operating System)を使用しての、ロボット制御のプログラミング技法を習得します。コンピュータボードRaspberry Pi上でのROSのセットアップ方法と仕組みの理解、センサやモータを動かすためのプログラミング技術を通して、ロボットのソフトウェア構築を効率よく行う能力を身につけます。また、ROS操作に必要なLinux OSのコマンドライン操作についても実習で行います。
≪前提知識≫
Linuxの基本的なコマンド操作及びプログラミング経験のある方
訓練内容
使用機器・教材
パソコン、Ubuntu、ROS2、Python、RaspberryPiMouse
持参品・服装
実施場所
高度ポリテクセンター
備考
関連コース
受講者の声
- ミドルウェアの概念、役割について知ることができた。
- 書籍より知識が深まった。
- ROSに限らず、他の知識(Linux,Git)が実践的に学べた。
- ROSを扱ったことが無かったため大変役に立った。
セミナーサンプル動画
お申込みはこちら