

1.フィードバック制御とは
(1)フィードバック制御とは
(2)微分方程式の必要性
(3)線形微分方程式の解とその性質
(4)MATLAB/SIMULINKの使用法
2.状態空間モデル
(1)線形化
(2)状態空間モデル
(3)制御対象の具体例
3.可制御性と状態フィードバック制御
(1)可制御性
(2)極配置設計法
(3)設計例
4.可観測性と状態観測器
(1)可観測性
(2)全状態観測器
(3)設計例
(4)最小次元観測器
5.離散化とマイコンへの実装
(1)離散化
(2)マイコンへの実装ならびに制御実験
6.最適レギュレータ
(1)評価関数の意味
(2)最適レギュレータ設計法
(3)設計例
7.まとめ
(1)実習に対する評価及び講評
(2)質疑応答
≪担当予定講師≫
元福井大学 川谷 亮治(『フリーソフトで学ぶ線形制御』など、著書多数)
コース番号 J0071 実例で学ぶ現代制御
訓練日程
10/9(水)~10/11(金)
実施時間帯
10:00~16:45(昼休憩45分)
総訓練時間
18時間
受講料
28,000円
定員
12名
対象者
~現代制御の活用法がわかりやすく習得できます~
制御系の開発・設計に携わる方
≪訓練内容の概要≫
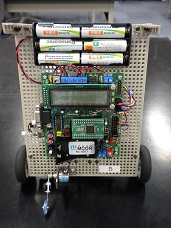
実習装置(台車系、倒立振子系)を対象として、現代制御理論に基づく制御系解析・設計法について解説します。また、学んだ理論の理解を深める目的で、実習装置に対するシミュレーションや制御実験を行います。
キーワード:現代制御、状態空間モデル、状態フィードバック制御、オブザーバ、サーボ系
制御系の開発・設計に携わる方
≪訓練内容の概要≫
実習装置(台車系、倒立振子系)を対象として、現代制御理論に基づく制御系解析・設計法について解説します。また、学んだ理論の理解を深める目的で、実習装置に対するシミュレーションや制御実験を行います。
キーワード:現代制御、状態空間モデル、状態フィードバック制御、オブザーバ、サーボ系
訓練内容
使用機器・教材
実習装置(台車系、倒立振子系)、ソフトウェア:MATLAB/Simulink
持参品・服装
実施場所
高度ポリテクセンター
備考
受講者の声
- 制御理論(状態フィードバック・オブザーバ等)について専門的な知識を身につけることができた。
- 制御理論について雰囲気をつかむことができました。今後、自分で詳しく勉強してみようというモチベーション向上にもつながりました。
- 極配置法や最適レギュレータ法などは、今まで用語を聞き何となく理解していたつもりであったが、本講義にて本質を学べたので非常に自己の成長につながった。
- サーボドライバのハード設計業務を現在行っているが、ソフトについての知識・理解を深めることができた。
- 実習を行う回数が多く、学んだことを実際に体験出来たため良かった。
セミナーサンプル動画
お申込みはこちら